

WP Monitor app for iPhone and iPad
4.4 (
384 ratings )
Entertainment
Developer: GCtronic Sagl
Free
Current version: 1.0, last update: 8 years agoFirst release : 13 May 2014
App size: 1016 Kb
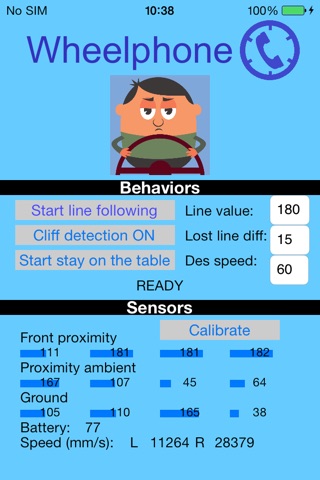
This application demonstrates bidirectional communication with the Wheelphone. The interface shows the sensors values (proximity, ground, battery) received from the robot and moreover lets you start some simple behaviors like "line following" and "stay on the table".
The line following is implemented directly on the phone side, instead the "stay on the table" exploits the onboard behaviors (both obstacle avoidance and cliff detection) to react as fast as possible.